How long have we all dreamed of an app that could provide us automatically with reliable plant id? Well, Leafsnap UK may not fully get there but it is already a huge step ahead. Leafsnap UK uses visual recognition software to identify tree species from photos of their leaves. Its leaf recognition technology (think of face recognition but for trees) was developed by the US Leafsnap teams at Columbia University, University of Maryland and the Smithsonian Institution. The Natural History Museum in London and the botanists working at the Angela Marmont Centre for UK Biodiversity ensured the accurate adaptation of British tree species.
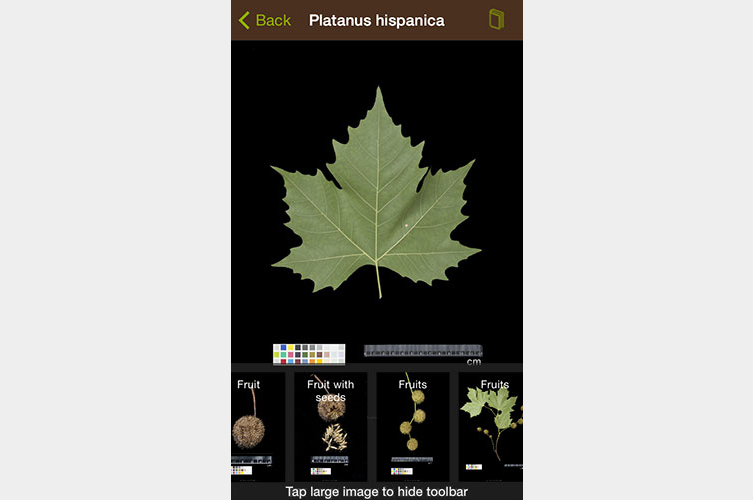
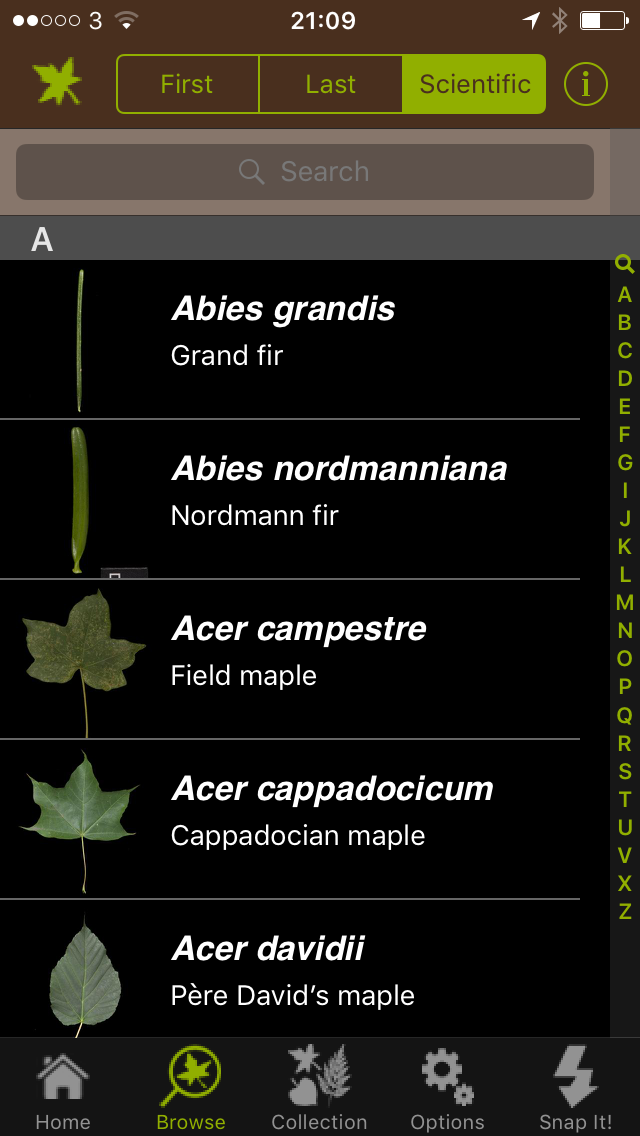
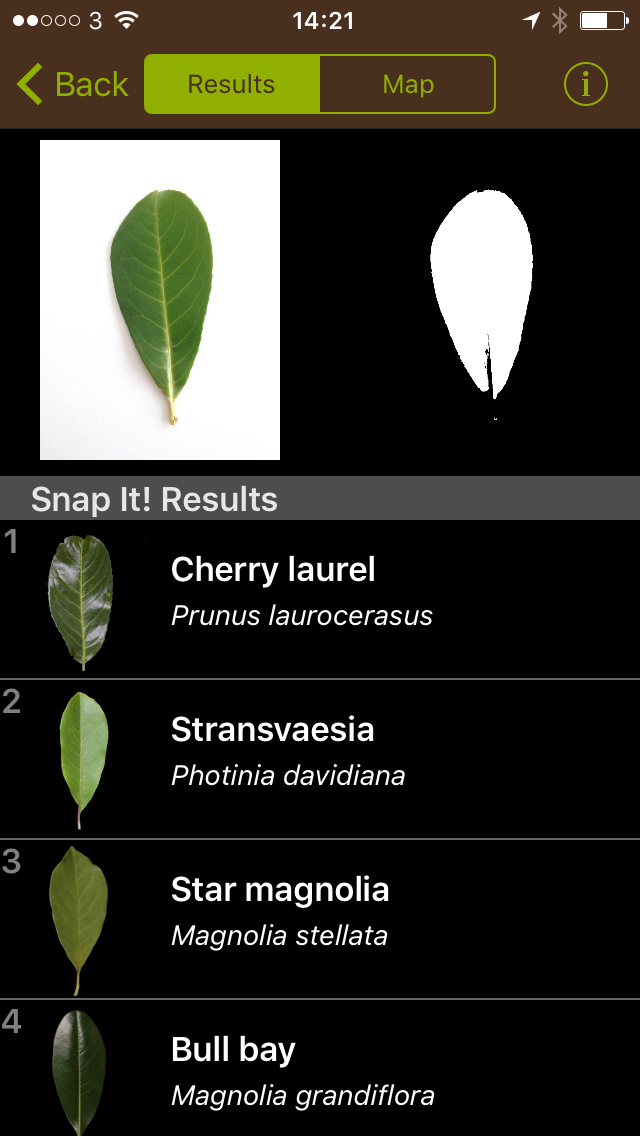
In order to identify a tree, you first have to photograph a leaf on a white background. Then, Leafsnap will suggest tree species with similar leafs to you. Now confirm the tree’s identity by checking the suggested images and text for matches. In a quick test in Weston Bank Park in Sheffield (UK), I still had to choose between 25 different species. However, that was already much quicker than other plant id apps, which are basically electronic versions of plant id books and where you have to go through the whole id process manually. An Android version is planned at the time of this post.
Leafsnap is available for free, but currently for iOS only in the AppStore